2.1.2.2. Autonomous Dissipative Flows
2.1.2.2.1. Main Functions
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.lorenz(parameters=[100, 10, 2.6666666666666665], dynamic_state=None, InitialConditions=[1e-10, 0.0, 1.0], L=100.0, fs=100, SampleSize=2000)[source]
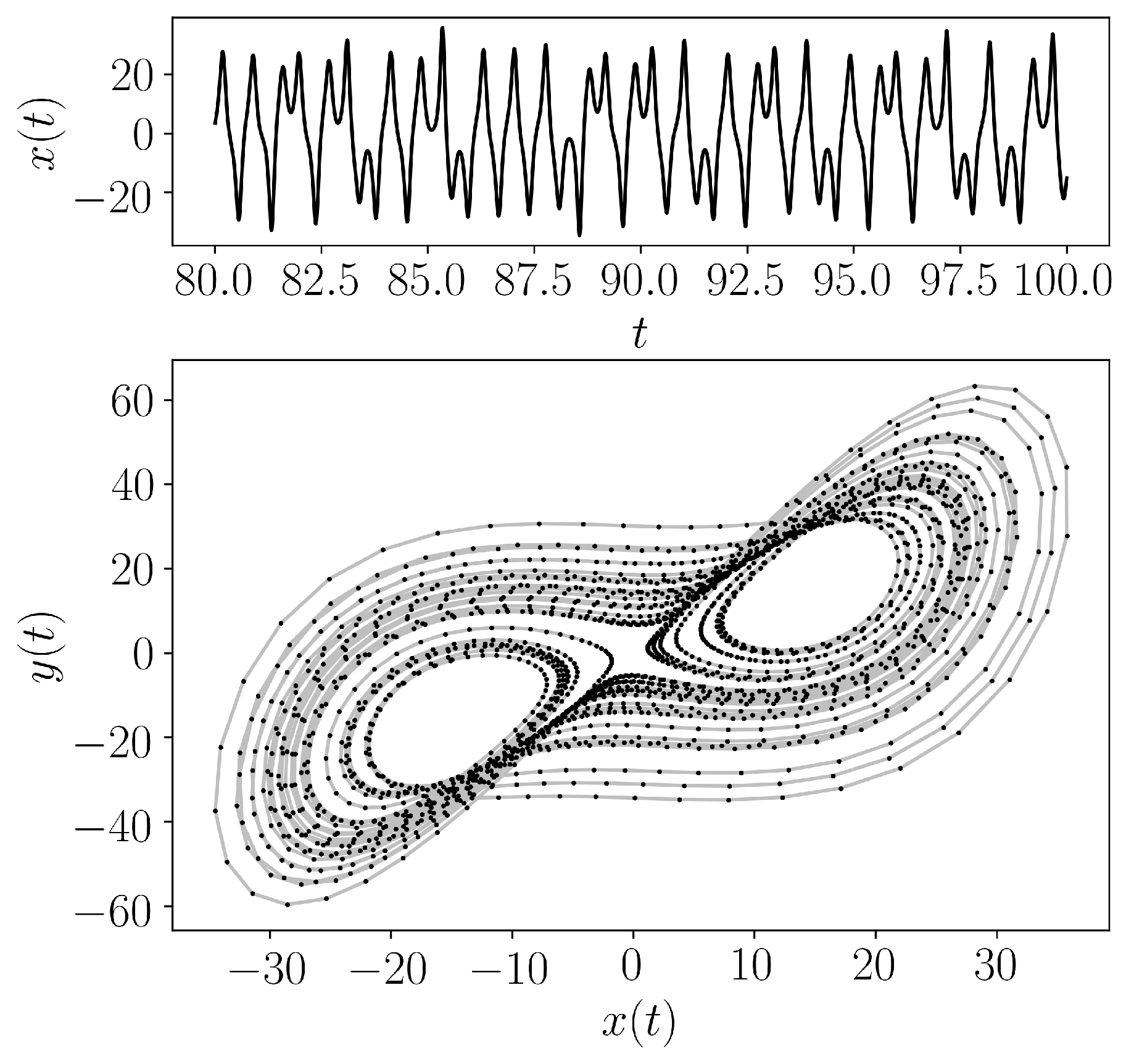
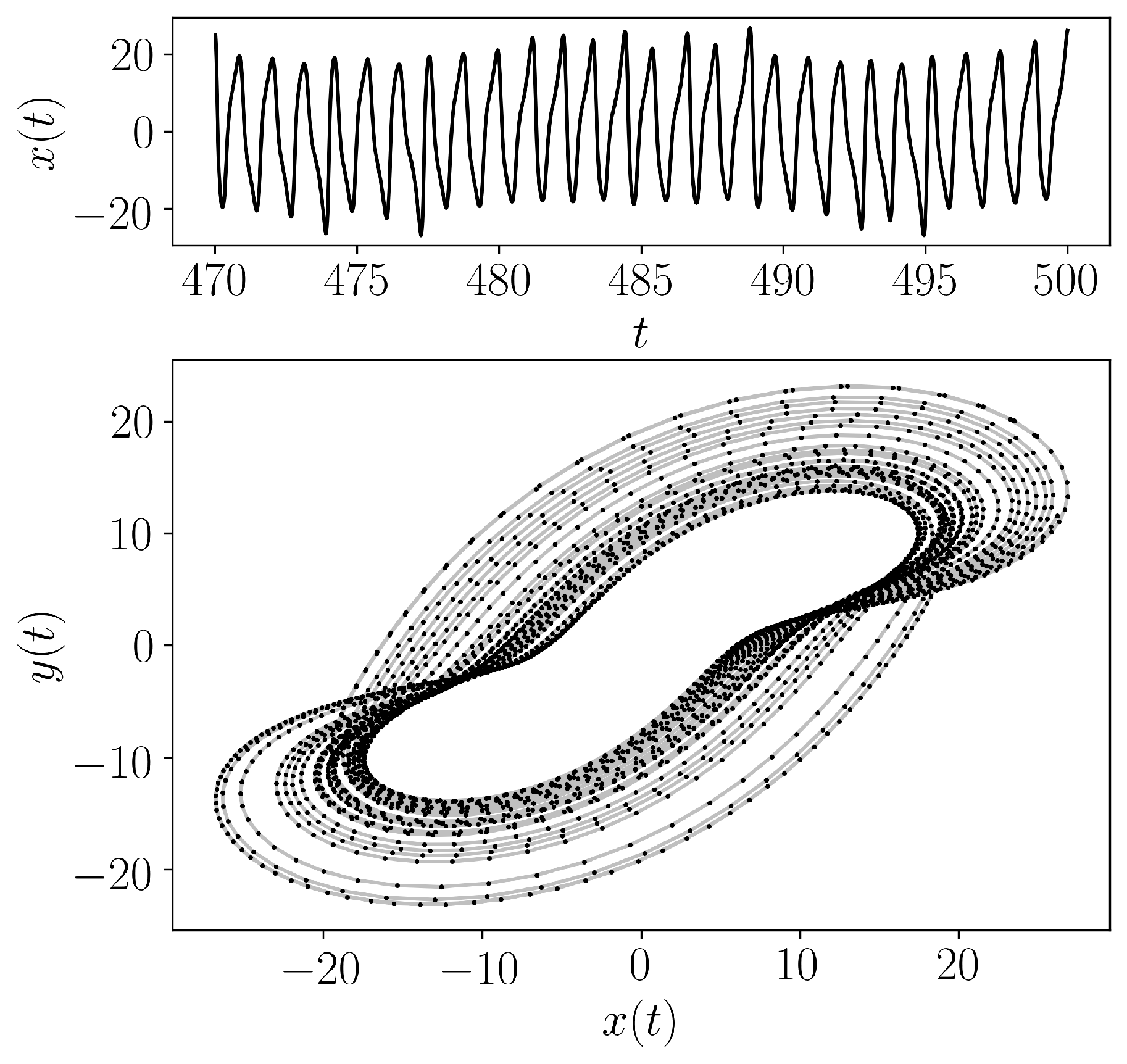
The Lorenz system used is defined as
\[ \begin{align}\begin{aligned}\dot{x} &= \sigma (y - x),\\\dot{y} &= x (\rho - z) - y,\\\dot{z} &= x y - \beta z\end{aligned}\end{align} \]The Lorenz system was solved with a sampling rate of 100 Hz for 100 seconds with only the last 20 seconds used to avoid transients. For a chaotic response, parameters of \(\sigma = 10.0\), \(\beta = 8.0/3.0\), and \(\rho = 105\) and initial conditions \([x_0,y_0,z_0] = [10^{-10},0,1]\) are used. For a periodic response set \(\rho = 100\).
- Parameters:
parameters (Optional[floats]) – Array of three floats [\(\rho\), \(\sigma\), \(\beta\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_{0}\), \(y_{0}\), \(z_{0}\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.rossler(parameters=[0.1, 0.2, 14], dynamic_state=None, InitialConditions=[-0.4, 0.6, 1], L=1000.0, fs=15, SampleSize=2500)[source]
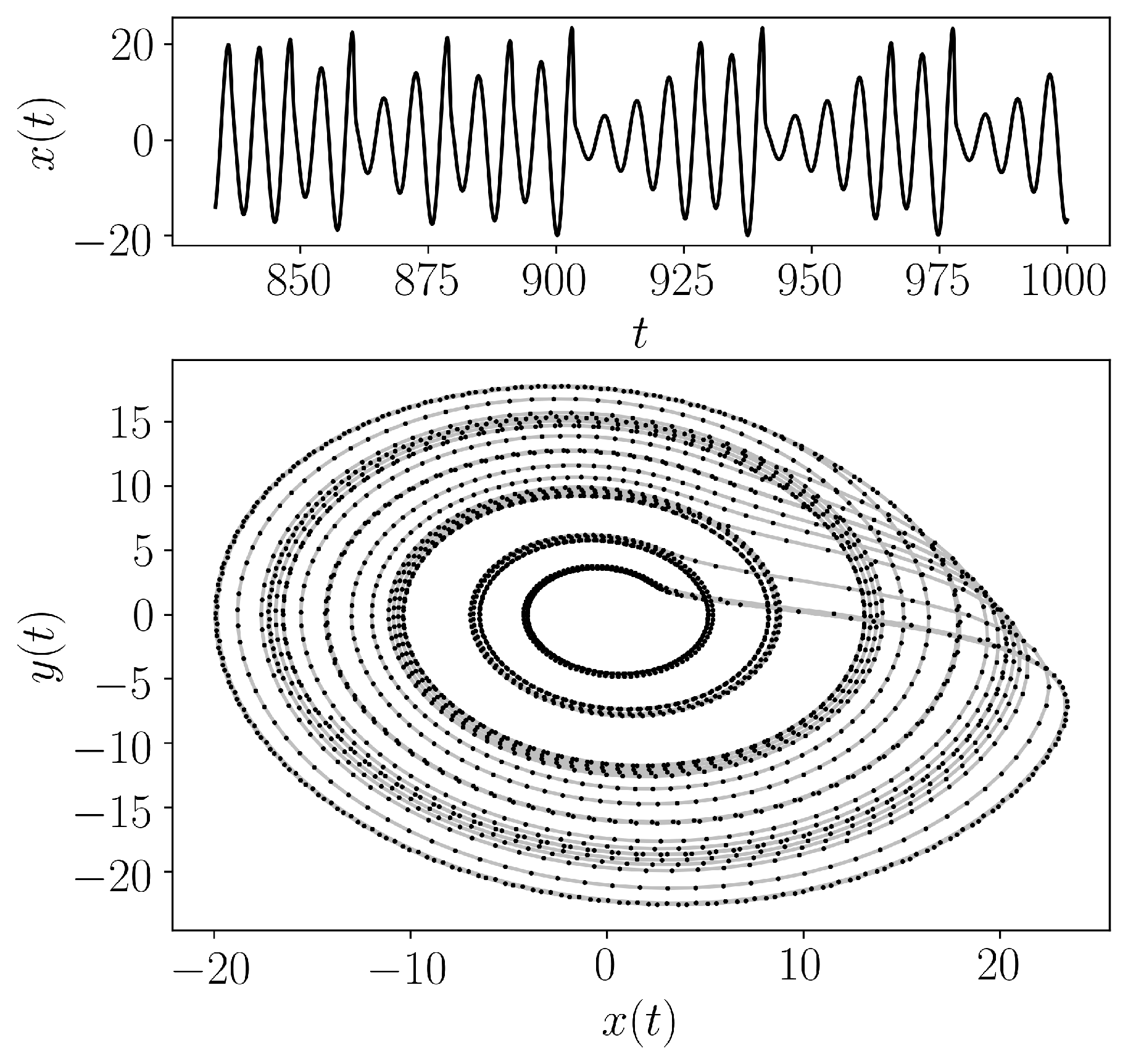
The Rössler system used was defined as
\[ \begin{align}\begin{aligned}\dot{x} &= -y-z,\\\dot{y} &= x + ay,\\\dot{z} &= b + z(x-c)\end{aligned}\end{align} \]The Rössler system was solved with a sampling rate of 15 Hz for 1000 seconds with only the last 166 seconds used to avoid transients. For a chaotic response, parameters of \(a = 0.15\), \(b = 0.2\), and \(c = 14\) and initial conditions \([x_0,y_0,z_0] = [-0.4,0.6,1.0]\) are used. For a periodic response set \(a = 0.10\).
- Parameters:
parameters (Optional[floats]) – Array of three floats [a, b, c] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_{0}\), \(y_{0}\), \(z_{0}\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.coupled_lorenz_rossler(parameters=[0.25, 2.6666666666666665, 0.2, 5.7, 0.1, 0.1, 0.1, 28, 10], dynamic_state=None, InitialConditions=[0.1, 0.1, 0.1, 0, 0, 0], L=500.0, fs=50, SampleSize=15000)[source]
The coupled Lorenz-Rössler system is defined as
\[ \begin{align}\begin{aligned}\dot{x}_1 &= -y_1-z_1+k_1(x_2-x_1),\\\dot{y}_1 &= x_1 + ay_1+k_2(y_2-y_1),\\\dot{z}_1 &= b_2 + z_1(x_1-c_2) + k_3(z_2-z_1),\\\dot{x}_2 &= \sigma (y_2-x_2),\\\dot{y}_2 &= \lambda x_2 - y_2 - x_2z_2,\\\dot{z}_2 &= x_2y_2 - b_1z_2\end{aligned}\end{align} \]where \(b_1 =8/3\), \(b_2 =0.2\), \(c_2 =5.7\), \(k_1 =0.1\), \(k_2 =0.1\), \(k_3 =0.1\), \(\lambda =28\), \(\sigma =10\),and \(a=0.25\) for a periodic response and \(a = 0.51\) for a chaotic response. This system was simulated at a frequency of 50 Hz for 500 seconds with the last 300 seconds used. The default initial condition is \([x_1, y_1, z_1, x_2, y_2, z_2]=[0.1,0.1,0.1,0,0,0]\).
- Parameters:
parameters (Optional[floats]) – Array of nine floats [\(a\), \(b_1\), \(b_2\), \(c_2\), \(k_1\), \(k_2\), \(k_3\), \(\lambda\), \(\sigma\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_{1, 0}\), \(y_{1, 0}\), \(z_{1, 0}\), \(x_{2, 0}\), \(y_{2, 0}\), \(z_{2, 0}\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.coupled_rossler_rossler(parameters=[0.25, 0.99, 0.95], dynamic_state=None, InitialConditions=[-0.4, 0.6, 5.8, 0.8, -2, -4], L=1000.0, fs=10, SampleSize=1500)[source]
The coupled Lorenz-Rössler system is defined as
\[ \begin{align}\begin{aligned}\dot{x}_1 &= -w_1y_1 - z_1 +k(x_2-x_1),\\\dot{y}_1 &= w_1x_1 + 0.165y_1,\\\dot{z}_1 &= 0.2 + z_1(x_1-10),\\\dot{x}_2 &= -w_2y_2-z_2 + k(x_1-x_2),\\\dot{y}_2 &= w_2x_2 + 0.165y_2,\\\dot{z}_2 &= 0.2 + z_2(x_2-10)\end{aligned}\end{align} \]with \(w_1 = 0.99\), \(w_2 = 0.95\), and \(k = 0.05\). This was solved for 1000 seconds with a sampling rate of 10 Hz. Only the last 150 seconds of the solution are used and the default initial condition is \([x_1, y_1, z_1, x_2, y_2, z_2]=[-0.4,0.6,5.8,0.8,-2,-4]\).
- Parameters:
parameters (Optional[floats]) – Array of three floats [\(k\), \(w_1\), \(w_2\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_{1, 0}\), \(y_{1, 0}\), \(z_{1, 0}\), \(x_{2, 0}\), \(y_{2, 0}\), \(z_{2, 0}\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
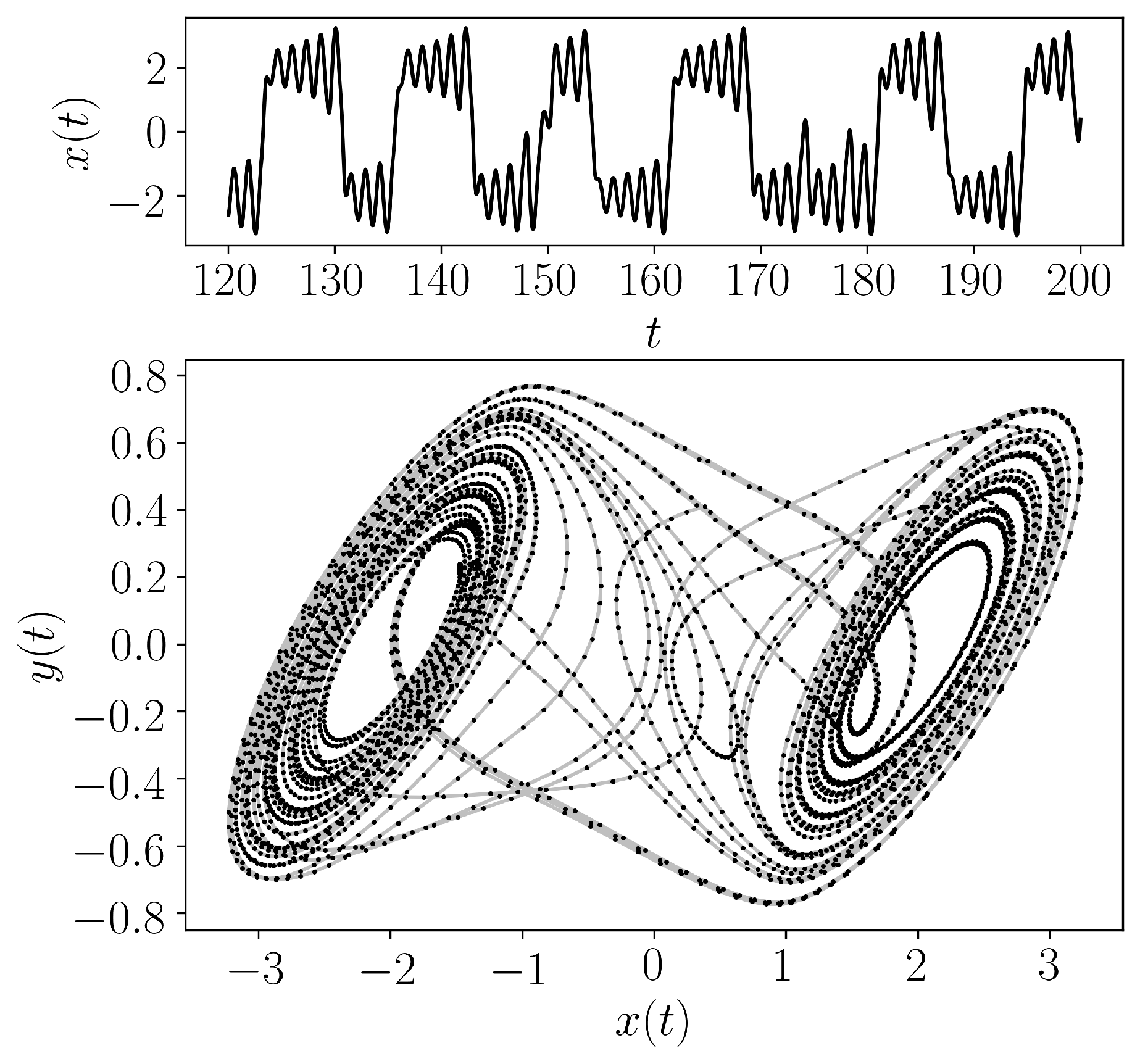
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.chua(parameters=[10.8, 27, 1.0, -0.42857142857142855, 0.42857142857142855], dynamic_state=None, InitialConditions=[1.0, 0.0, 0.0], L=200.0, fs=50, SampleSize=4000)[source]
Chua’s circuit is based on a non-linear circuit and is described as
\[ \begin{align}\begin{aligned}\dot{x} &= \alpha (y-f(x)),\\\dot{y} &= \gamma (x-y+z),\\\dot{z} &= -\beta y,\end{aligned}\end{align} \]where \(f(x)\) is based on a non-linear resistor model defined as
\[f(x) = m_1x + \frac{1}{2}(m_0+m_1)[|x+1| - |x-1|]\]The system parameters are set to \(\beta=27\), \(\gamma=1\), \(m_0 =-3/7\), \(m_1 =3/7\), and \(\alpha=10.8\) for a periodic response and \(\alpha = 12.8\) for a chaotic response. The system was simulated for 200 seconds at a rate of 50 Hz and the last 80 seconds are used.
- Parameters:
parameters (Optional[floats]) – Array of five floats [\(a\), \(B\), \(g\), \(m_0\), \(m_1\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.double_pendulum(parameters=[1, 1, 1, 1, 9.81], dynamic_state=None, InitialConditions=[0.4, 0.6, 1, 1], L=100.0, fs=100, SampleSize=5000)[source]
The double pendulum is a staple bench top experiment for investigated chaos in a mechanical system. A point-mass double pendulum’s equations of motion are defined as
\[ \begin{align}\begin{aligned}\dot{\theta}_1 &= \omega_1,\\\dot{\theta}_2 &= \omega_2,\\\dot{\omega}_1 &= \frac{-g(2m_1+m_2)\sin(\theta_1) - m_2g\sin(\theta_1-2\theta_2) - 2\sin(\theta_1-\theta2)m_2(\omega_2^2 l_2 + \omega_1^2 l_1\cos(\theta_1-\theta_2))}{l_1(2m_1+m_2-m_2\cos(2\theta_1-2\theta_2))},\\\dot{\omega}_2 &= \frac{2\sin(\theta_1-\theta_2)(\omega_1^2 l_1(m_1+m_2)+g(m_1+m_2)\cos(\theta_1)+\omega_2^2 l_2m_2\cos(\theta_1-\theta_2))}{l_2(2m_1+m_2-m_2\cos(2\theta_1-2\theta_2))}\end{aligned}\end{align} \]where the system parameters are \(g=9.81 m/s^2\), \(m_1 =1 kg\), \(m_2 =1 kg\), \(l_1 = 1 m\), and \(l_2 =1 m\). The system was solved for 200 seconds at a rate of 100 Hz and only the last 30 seconds were used as shown in the figure below for the chaotic response with initial conditions \([\theta_1, \theta_2, \omega_1, \omega_2] = [0, 3 rad, 0, 0]\). This system will have different dynamic states based on the initial conditions, which can vary from periodic, quasiperiodic, and chaotic.
- Parameters:
parameters (Optional[floats]) – Array of five floats [\(m_1\), \(m_2\), \(l_1\), \(l_2\), \(g\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(\theta_{1, 0}\), \(\theta_{2, 0}\), \(\omega_{1, 0}\), \(\omega_{2, 0}\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.diffusionless_lorenz_attractor(parameters=[0.25], dynamic_state=None, InitialConditions=[1, -1, 0.01], L=1000.0, fs=40, SampleSize=10000)[source]
The Diffusionless Lorenz attractor is defined as
\[ \begin{align}\begin{aligned}\dot{x} &= -y-x,\\\dot{y} &= -xz,\\\dot{z} &= xy + R\end{aligned}\end{align} \]The system parameter is set to \(R = 0.40\) for a chaotic response and \(R = 0.25\) for a periodic response. The initial conditions were set to \([x, y, z] = [1.0, -1.0, 0.01]\). The system was simulated for 1000 seconds at a rate of 40 Hz and the last 250 seconds were used for the chaotic response.
- Parameters:
parameters (Optional[floats]) – Array of one float [\(R\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.complex_butterfly(parameters=[0.15], dynamic_state=None, InitialConditions=[0.2, 0.0, 0.0], L=1000.0, fs=10, SampleSize=5000)[source]
The Complex Butterfly attractor [1] is defined as
\[ \begin{align}\begin{aligned}\dot{x} &= a(y-x),\\\dot{y} &= z~\text{sgn}(x),\\\dot{z} &= |x|-1\end{aligned}\end{align} \]The system parameter is set to \(a = 0.55\) for a chaotic response and \(a = 0.15\) for a periodic response. The initial conditions were set to \([x, y, z] = [0.2, 0.0, 0.0]\). The system was simulated for 1000 seconds at a rate of 10 Hz and the last 500 seconds were used for the chaotic response.
- Parameters:
parameters (Optional[floats]) – Array of one float [\(a\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
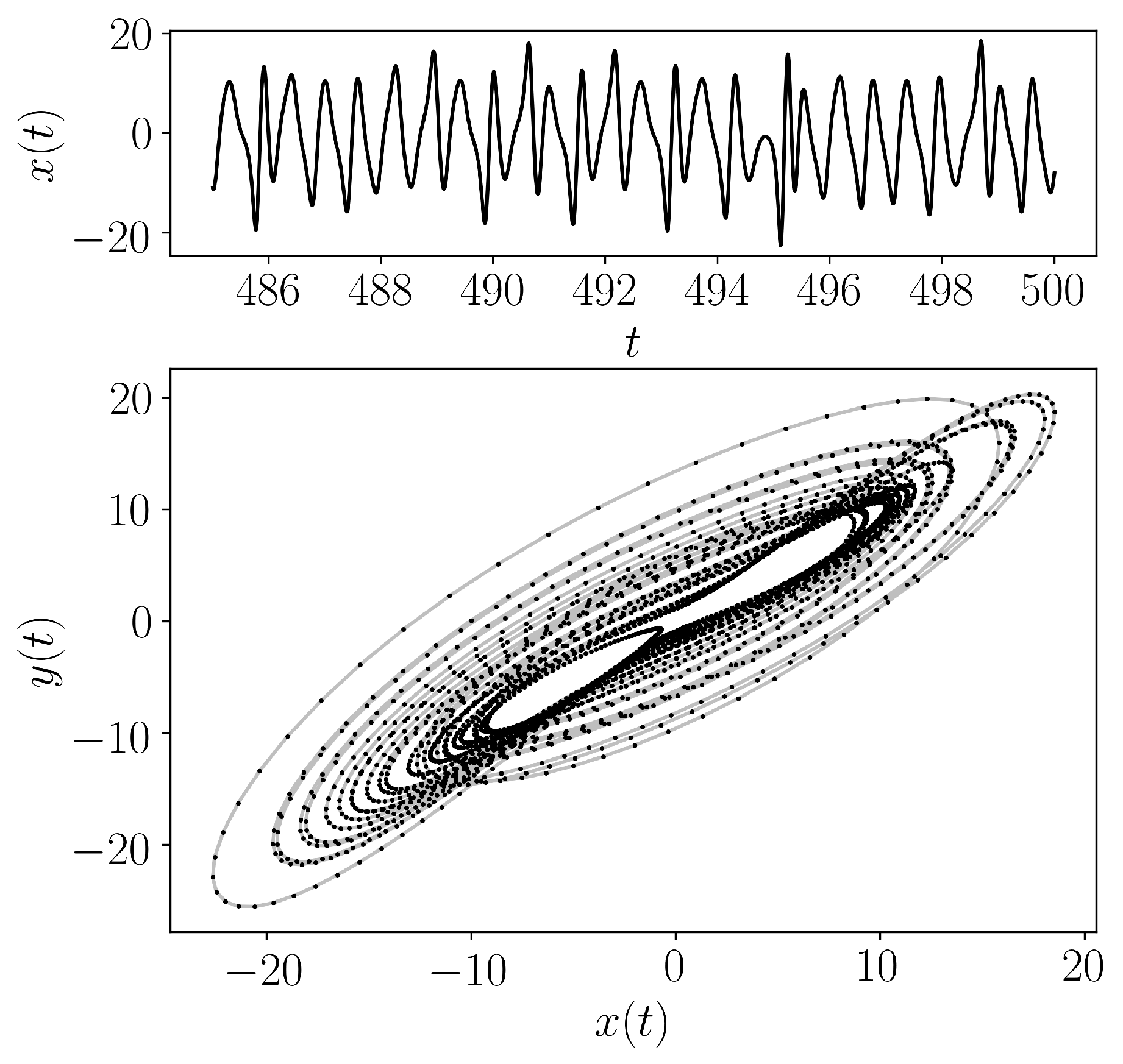
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.chens_system(parameters=[30.0, 3.0, 28.0], dynamic_state=None, InitialConditions=[-10, 0, 37], L=500.0, fs=200, SampleSize=3000)[source]
Chen’s System is defined [2] as
\[ \begin{align}\begin{aligned}\dot{x} &= a(y-x),\\\dot{y} &= (c-a)x-xz+cy,\\\dot{z} &= xy-bz\end{aligned}\end{align} \]The system parameters are set to \(a = 35\), \(b = 3\), and \(c = 28\) for a chaotic response and \(a = 30\) for a periodic response. The initial conditions were set to \([x, y, z] = [-10, 0, 37]\). The system was simulated for 500 seconds at a rate of 200 Hz and the last 15 seconds were used for the chaotic response.
- Parameters:
parameters (Optional[floats]) – Array of three floats [\(a\), \(b\), \(c\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.hadley_circulation(parameters=[0.25, 4, 8, 1], dynamic_state=None, InitialConditions=[-10, 0, 37], L=500.0, fs=50, SampleSize=4000)[source]
Hadley Circulation System is defined as
\[ \begin{align}\begin{aligned}\dot{x} &= -y^2 - z^2 - ax + aF,\\\dot{y} &= xy - bxz - y + G,\\\dot{z} &= bxy + xz - z\end{aligned}\end{align} \]The system parameters are set to \(a = 0.25\), \(b = 4\), \(F = 8`and :math:`G = 1\) for a periodic response and \(a = 0.3\) for a chaotic response. The initial conditions were set to \([x, y, z] = [-10, 0, 37]\).
- Parameters:
parameters (Optional[floats]) – Array of four floats [\(a\), \(b\), \(F`\), \(G\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.ACT_attractor(parameters=[2.5, 0.02, 1.5, -0.07], dynamic_state=None, InitialConditions=[0.5, 0, 0], L=500.0, fs=50, SampleSize=4000)[source]
ACT Attractor is defined [3] as
\[ \begin{align}\begin{aligned}\dot{x} &= \alpha(x-y),\\\dot{y} &= -4\alpha y + xz + \mu x^3,\\\dot{z} &= -\delta \alpha z + xy + \beta z^2\end{aligned}\end{align} \]The system parameters are set to \(\alpha = 2.5\), \(\mu = 0.02\), \(\delta = 1.5`and :math:\)beta = -0.07` for a periodic response and \(a = 2.0\) for a chaotic response. The initial conditions were set to \([x, y, z] = [0.5, 0, 0]\).
- Parameters:
parameters (Optional[floats]) – Array of four floats [\(\alpha\), \(\mu\), \(\delta`\), \(\beta\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
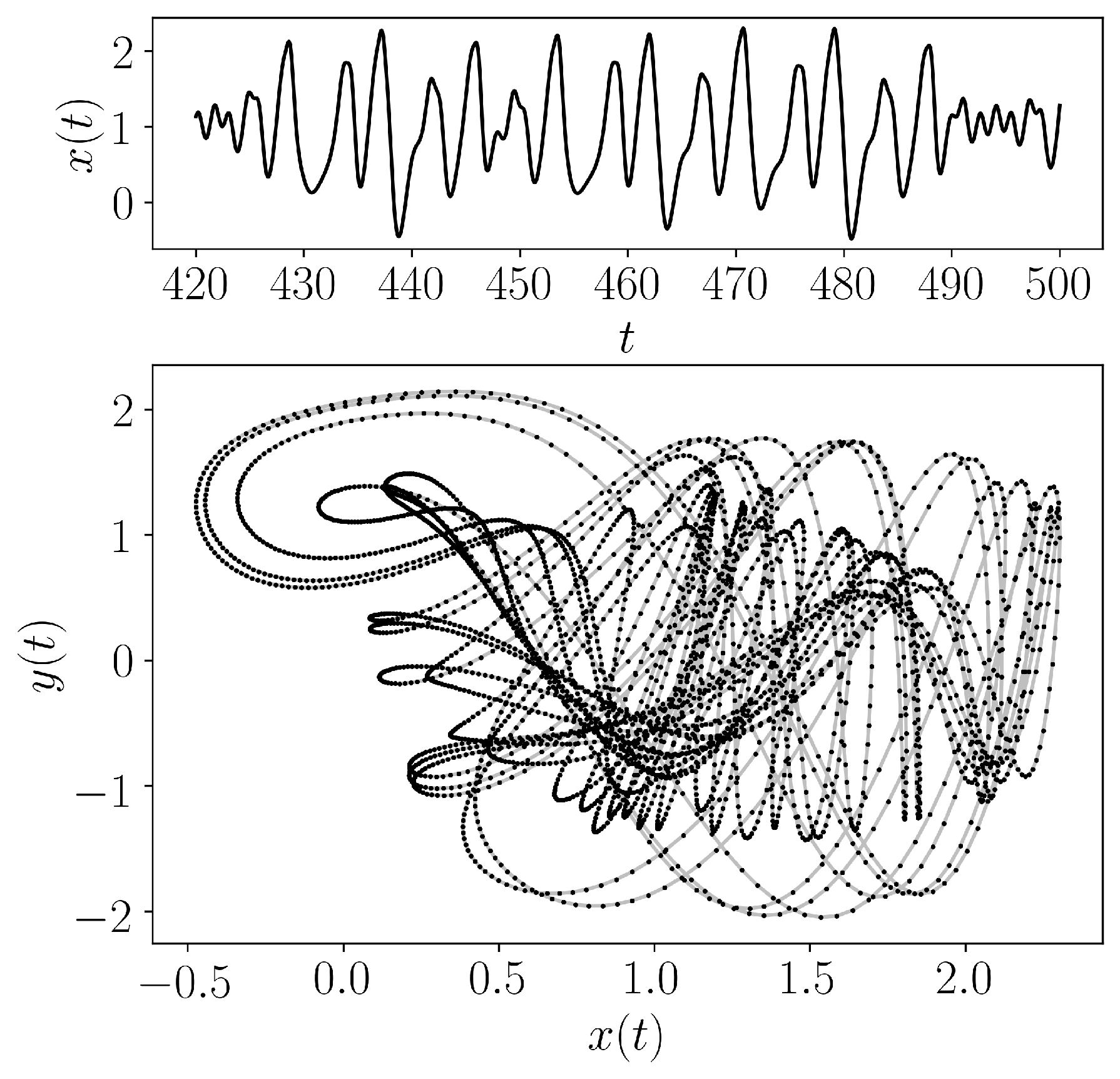
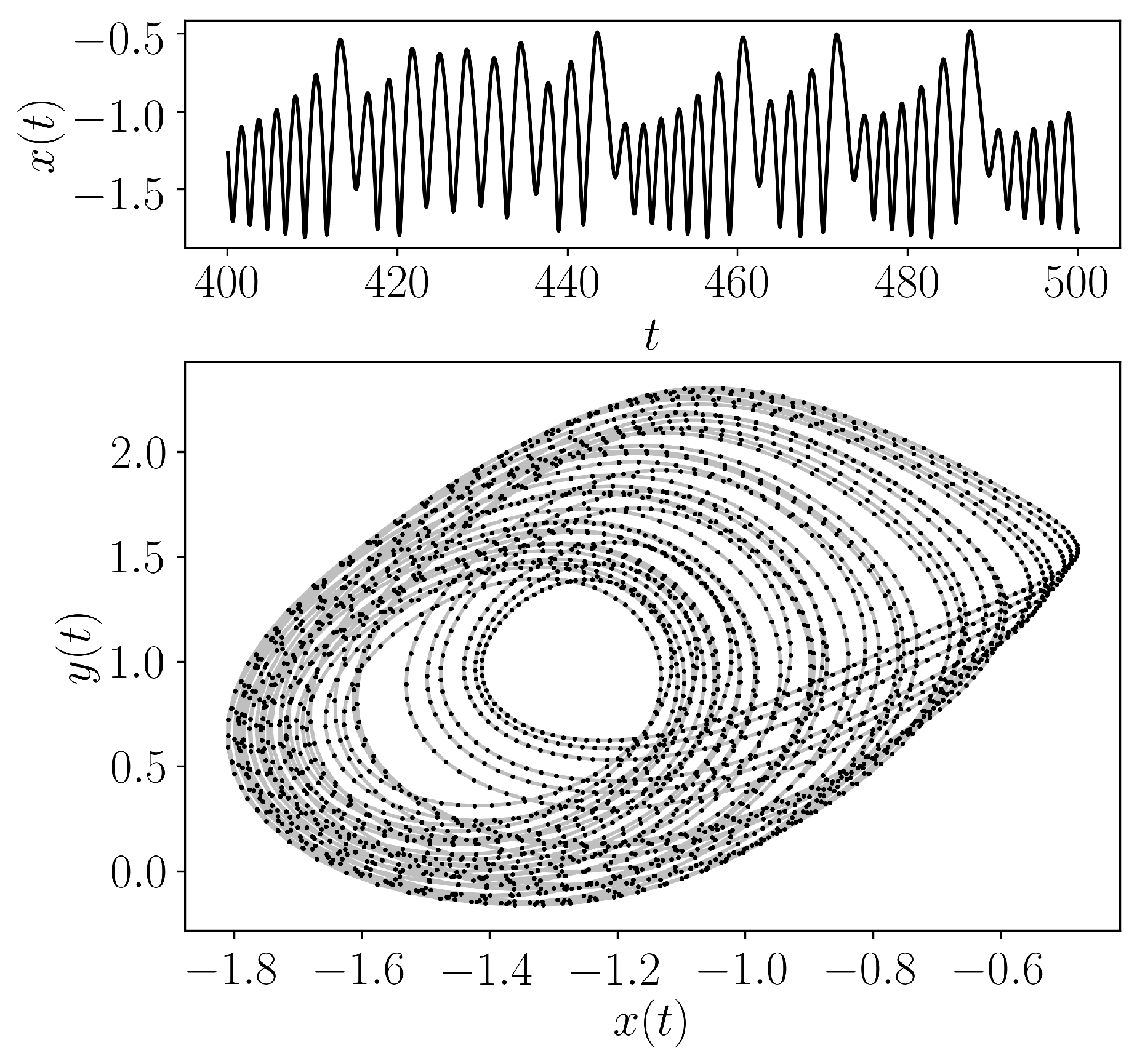
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.rabinovich_frabrikant_attractor(parameters=[1.16, 0.87], dynamic_state=None, InitialConditions=[-1, 0, 0.5], L=500.0, fs=30, SampleSize=3000)[source]
Rabinovich-Frabrikant Attractor is defined [4] as
\[ \begin{align}\begin{aligned}\dot{x} &= y(z - 1 + x^2) + \alpha x,\\\dot{y} &= x(3z + 1 - x^2) + \alpha y,\\\dot{z} &= -2z(\gamma + xy)\end{aligned}\end{align} \]The system parameters are set to \(\alpha = 1.16\) and \(\gamma = 0.87\) for a periodic response and \(\alpha = 1.13\) for a chaotic response. The initial conditions were set to \([x, y, z] = [-1, 0, 0.5]\).
- Parameters:
parameters (Optional[floats]) – Array of two floats [\(\alpha\), \(\gamma\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.linear_feedback_rigid_body_motion_system(parameters=[5.3, -10, -3.8], dynamic_state=None, InitialConditions=[0.2, 0.2, 0.2], L=500.0, fs=100, SampleSize=3000)[source]
Linear Feedback Rigid Body Motion System is defined [5] as
\[ \begin{align}\begin{aligned}\dot{x} &= yx,\\\dot{y} &= xz + by,\\\dot{z} &= \frac{1}{3}xy + cz\end{aligned}\end{align} \]The system parameters are set to \(a = 5.3\), \(b = -10\), \(c = -3.8\) for a periodic response and \(a = 5\) for a chaotic response. The initial conditions were set to \([x, y, z] = [0.2, 0.2, 0.2]\).
- Parameters:
parameters (Optional[floats]) – Array of three floats [\(a\), \(b\), \(c\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.moore_spiegel_oscillator(parameters=[7.8, 20], dynamic_state=None, InitialConditions=[0.2, 0.2, 0.2], L=500.0, fs=100, SampleSize=5000)[source]
The Moore-Spiegel Oscillator is defined [6] as
\[ \begin{align}\begin{aligned}\dot{x} &= y,\\\dot{y} &= z,\\\dot{z} &= -z - (T - R + Rx^2)y - Tx\end{aligned}\end{align} \]The system parameters are set to \(T = 7.8\), \(R = 20\) for a periodic response and \(T = 7\) for a chaotic response. The initial conditions were set to \([x, y, z] = [0.2, 0.2, 0.2]\).
- Parameters:
parameters (Optional[floats]) – Array of two floats [\(T\), \(R\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.thomas_cyclically_symmetric_attractor(parameters=[0.17], dynamic_state=None, InitialConditions=[0.1, 0, 0], L=1000.0, fs=10, SampleSize=5000)[source]
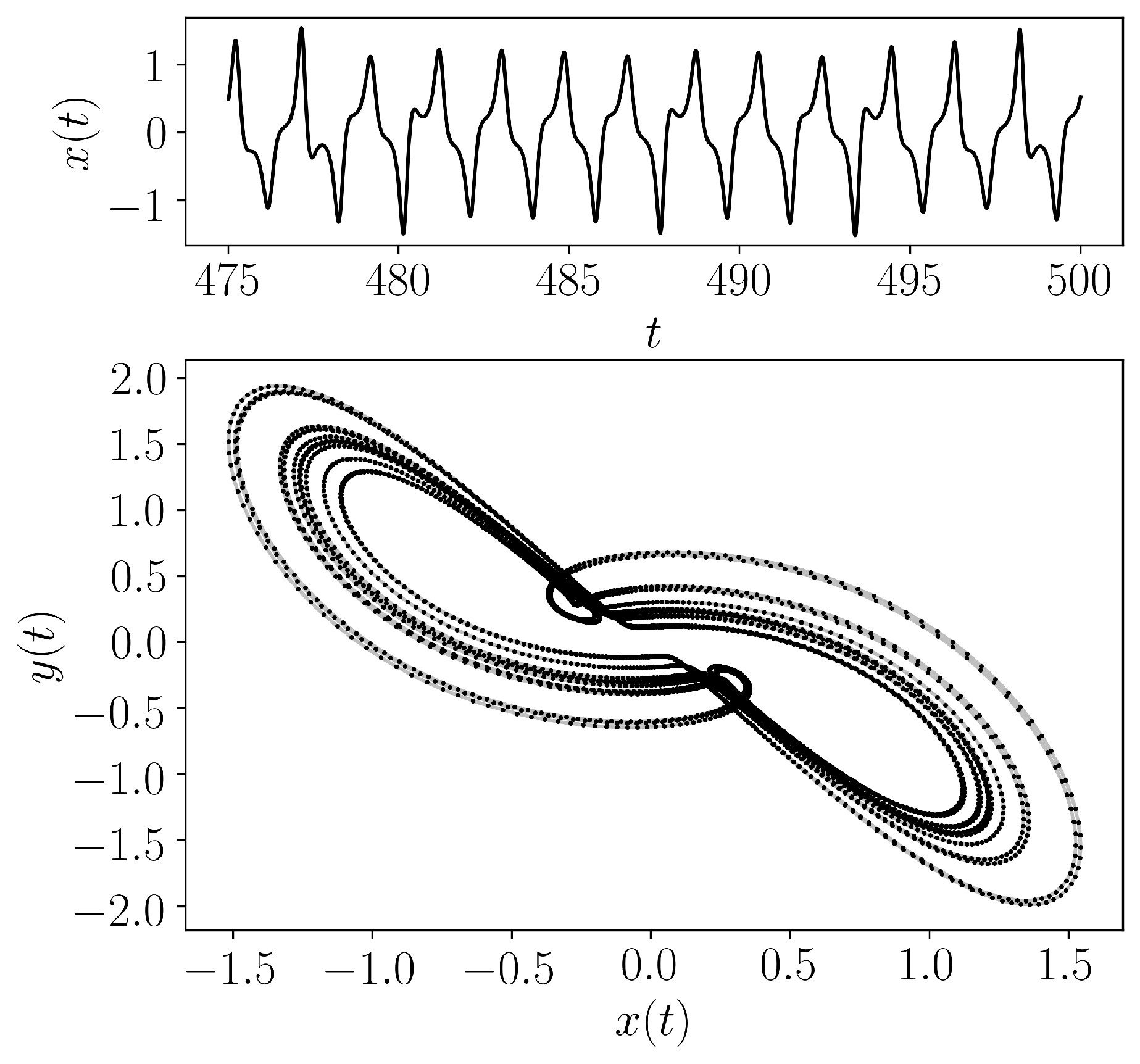
The Thomas Cyclically Symmetric Attractor is defined [7] as
\[ \begin{align}\begin{aligned}\dot{x} &= -bx + \sin{y},\\\dot{y} &= -by + \sin{z},\\\dot{z} &= -bz + \sin{x}\end{aligned}\end{align} \]The system parameters are set to \(b = 0.17\) for a periodic response and \(b = 0.18\) for a chaotic response. The initial conditions were set to \([x, y, z] = [0.1, 0, 0]\).
- Parameters:
parameters (Optional[floats]) – Array of one float [\(b\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.halvorsens_cyclically_symmetric_attractor(parameters=[1.85, 4, 4], dynamic_state=None, InitialConditions=[-5, 0, 0], L=200.0, fs=200, SampleSize=5000)[source]
The Halvorsens Cyclically Symmetric Attractor is defined as
\[ \begin{align}\begin{aligned}\dot{x} &= -ax - by - cz - y^2,\\\dot{y} &= -ay - bz - cz - z^2,\\\dot{z} &= -az - bx - cy - x^2\end{aligned}\end{align} \]The system parameters are set to \(a = 1.85\), \(b = 4\), \(c = 4\) for a periodic response and \(a = 1.45\) for a chaotic response. The initial conditions were set to \([x, y, z] = [-5, 0, 0]\).
- Parameters:
parameters (Optional[floats]) – Array of three floats [\(a\), \(b\), \(c\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.burke_shaw_attractor(parameters=[12.0, 4.0], dynamic_state=None, InitialConditions=[0.6, 0.0, 0.0], L=500.0, fs=200, SampleSize=5000)[source]
The Burke-Shaw Attractor is defined [8] as
\[ \begin{align}\begin{aligned}\dot{x} &= s(x+y),\\\dot{y} &= -y - sxz,\\\dot{z} &= sxy + V\end{aligned}\end{align} \]The system parameters are set to \(s = 12\), \(V = 4\), and \(c = 28\) for a periodic response and \(s = 10\) for a chaotic response. The initial conditions were set to \([x, y, z] = [0.6,0.0,0.0]\). The system was simulated for 500 seconds at a rate of 200 Hz and the last 25 seconds were used for the chaotic response.
- Parameters:
parameters (Optional[floats]) – Array of two floats [\(s\), \(V\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
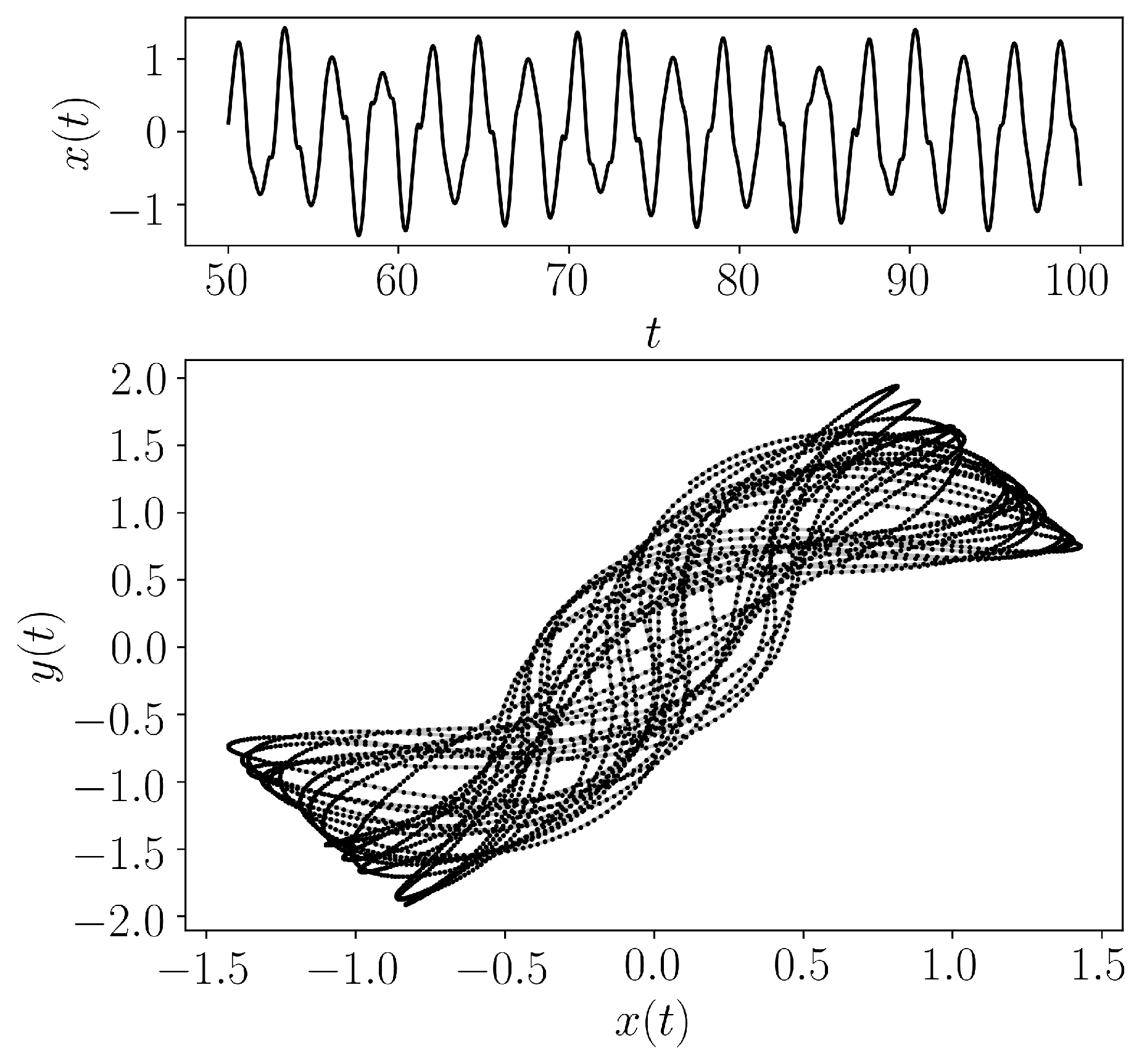
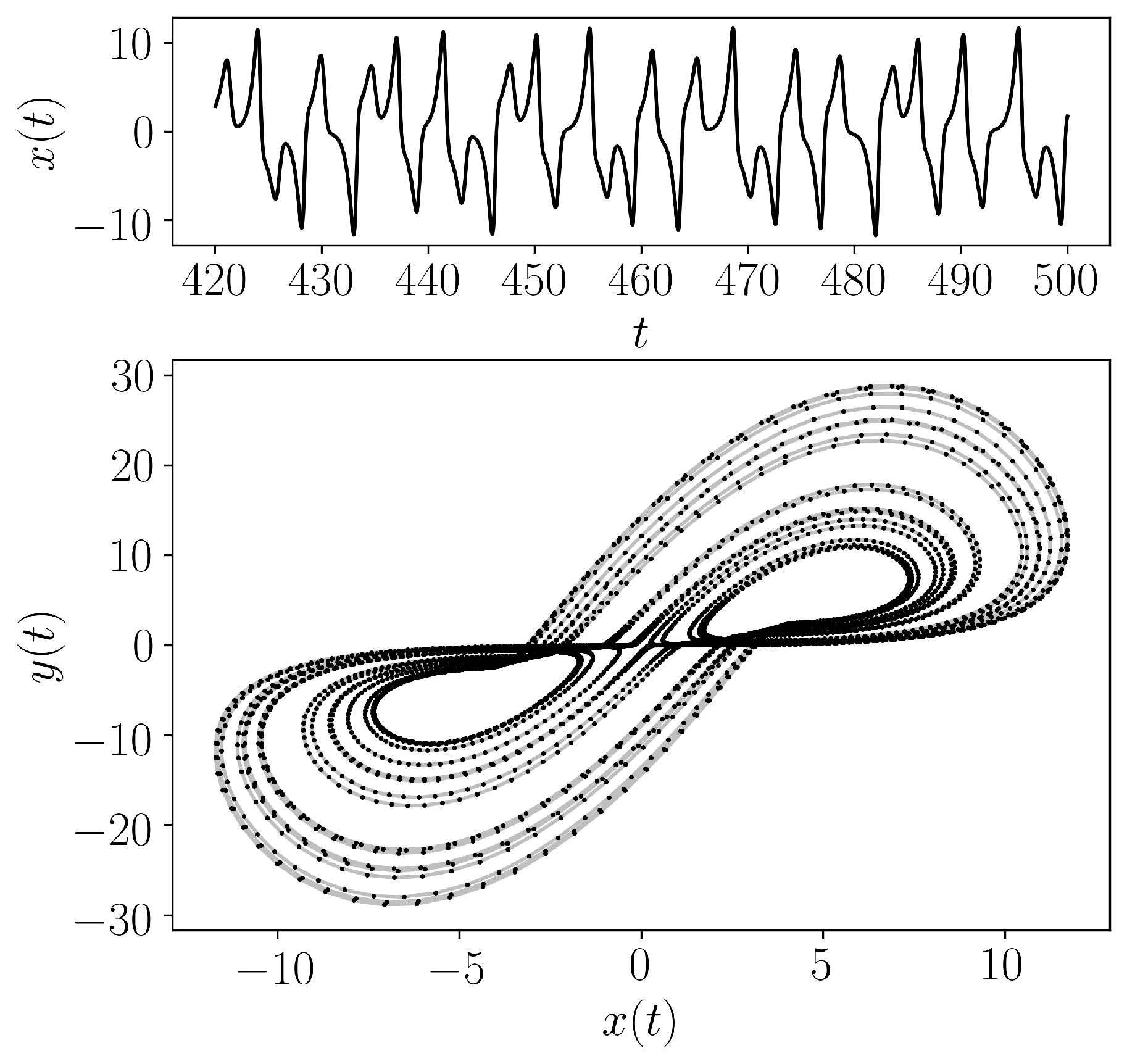
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.rucklidge_attractor(parameters=[1.1, 6.7], dynamic_state=None, InitialConditions=[1.0, 0.0, 4.5], L=1000.0, fs=50, SampleSize=5000)[source]
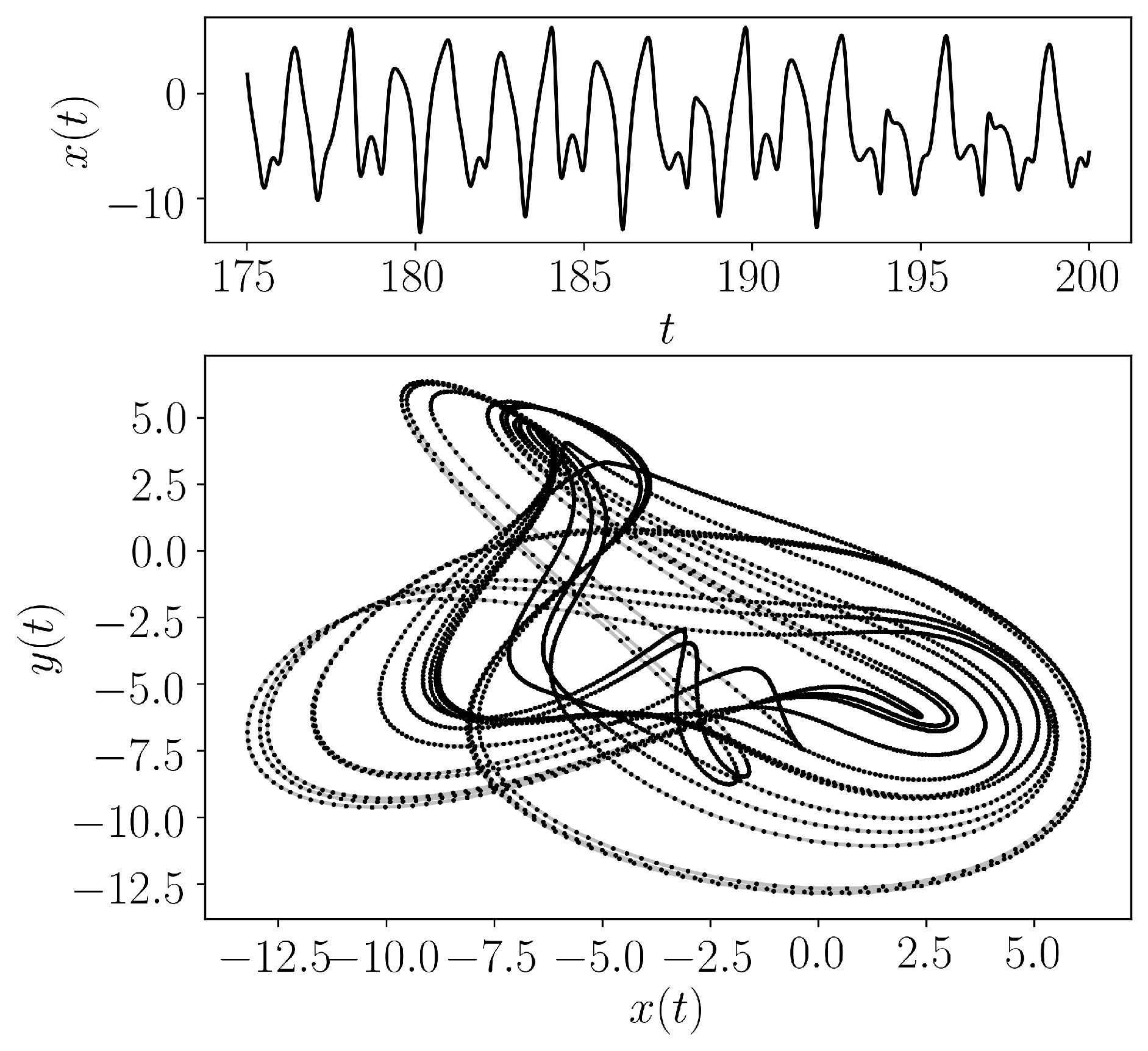
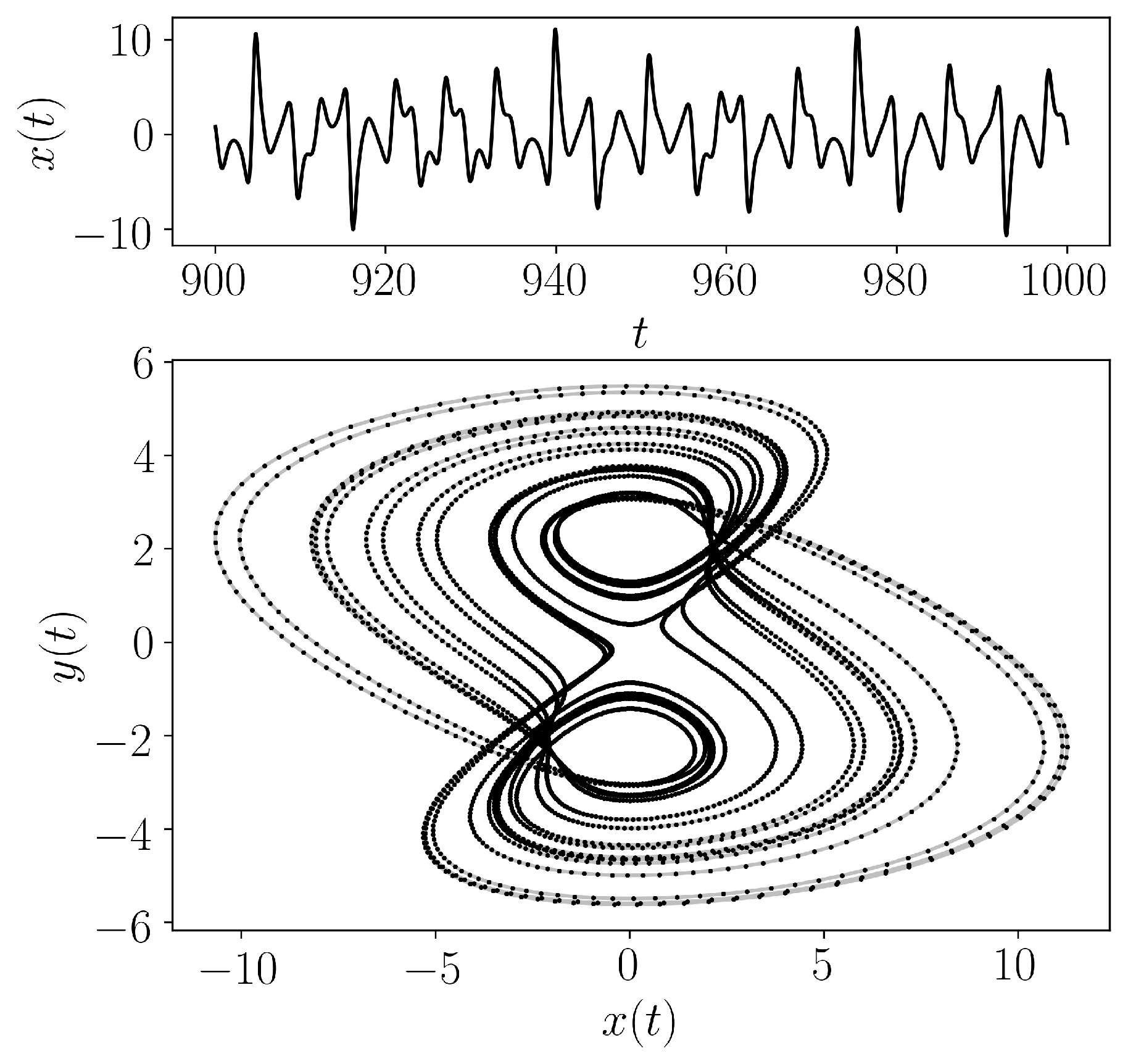
The Rucklidge Attractor is defined [9] as
\[ \begin{align}\begin{aligned}\dot{x} &= -kx + \lambda y - yz,\\\dot{y} &= x,\\\dot{z} &= -z + y^2\end{aligned}\end{align} \]The system parameters are set to \(k = 1.1\), \(\lambda = 6.7\) for a periodic response and \(k = 1.6\) for a chaotic response. The initial conditions were set to \([x, y, z] = [1.0,0.0,4.5]\). The system was simulated for 1000 seconds at a rate of 50 Hz and the last 100 seconds were used for the chaotic response.
- Parameters:
parameters (Optional[floats]) – Array of two floats [\(k\), \(\lambda\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.WINDMI(parameters=[0.9, 2.5], dynamic_state=None, InitialConditions=[1.0, 0.0, 4.5], L=1000.0, fs=20, SampleSize=5000)[source]
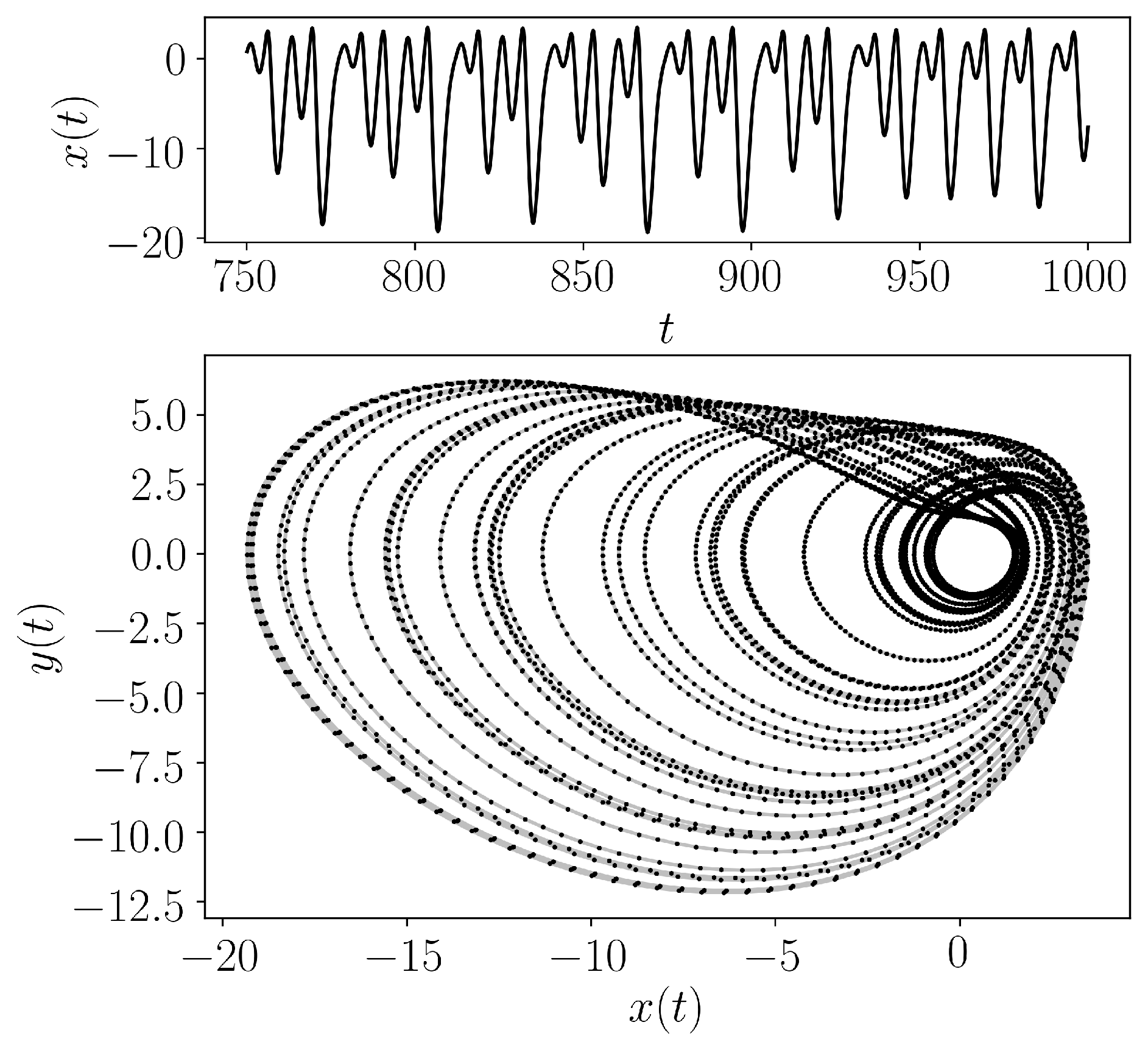
The WINDMI Attractor is defined [10] as
\[ \begin{align}\begin{aligned}\dot{x} &= y,\\\dot{y} &= z,\\\dot{z} &= -az - y + b - e^x\end{aligned}\end{align} \]The system parameters are set to \(a = 0.9\), \(b = 2.5\) for a periodic response and \(a = 0.8\) for a chaotic response. The initial conditions were set to \([x, y, z] = [1.0,0.0,4.5]\). The system was simulated for 1000 seconds at a rate of 20 Hz and the last 250 seconds were used for the chaotic response.
- Parameters:
parameters (Optional[floats]) – Array of two floats [\(a\), \(b\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.simplest_quadratic_chaotic_flow(parameters=[2.017, 1.0], dynamic_state=None, InitialConditions=[-0.9, 0.0, 0.5], L=1000.0, fs=20, SampleSize=5000)[source]
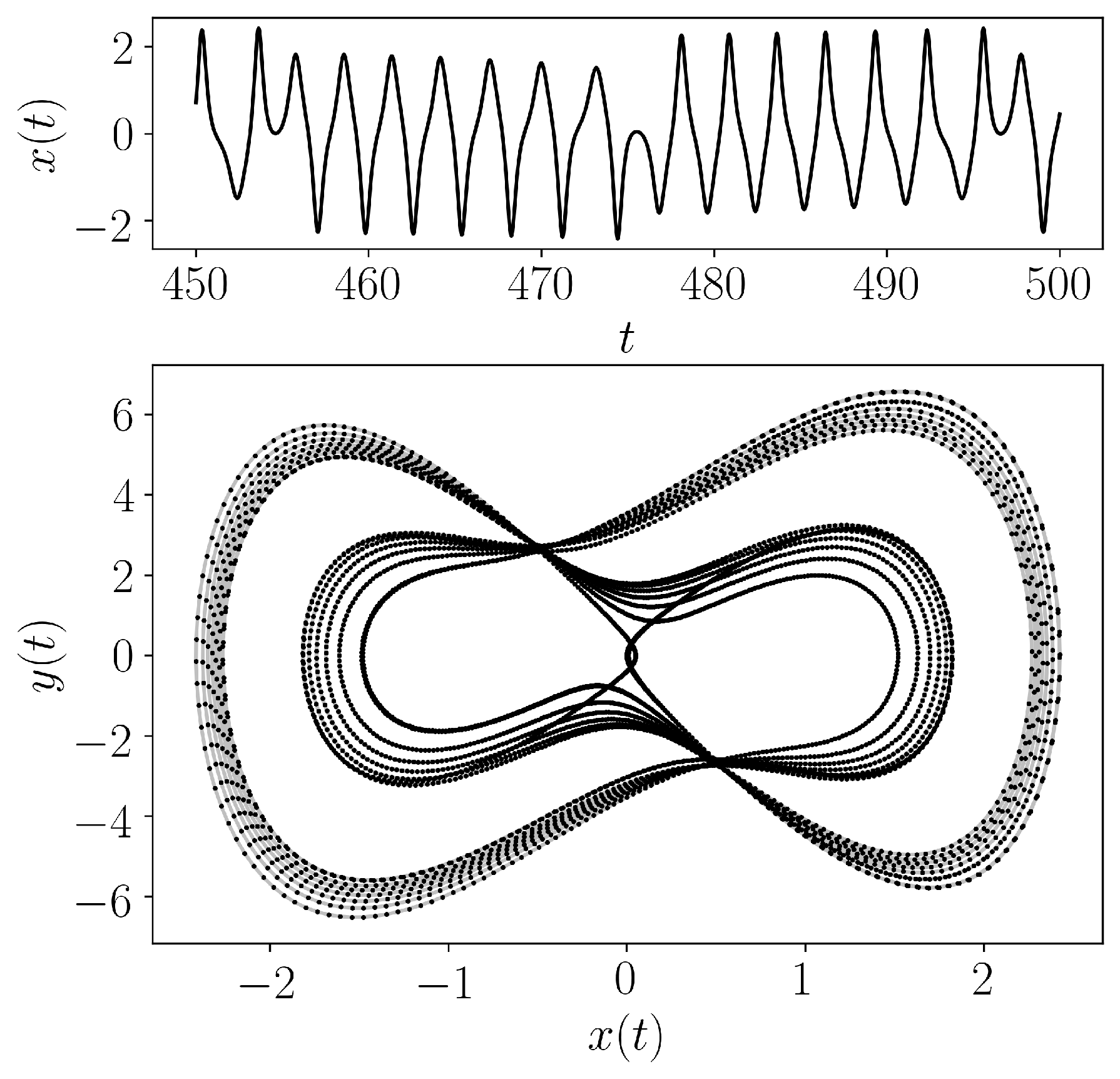
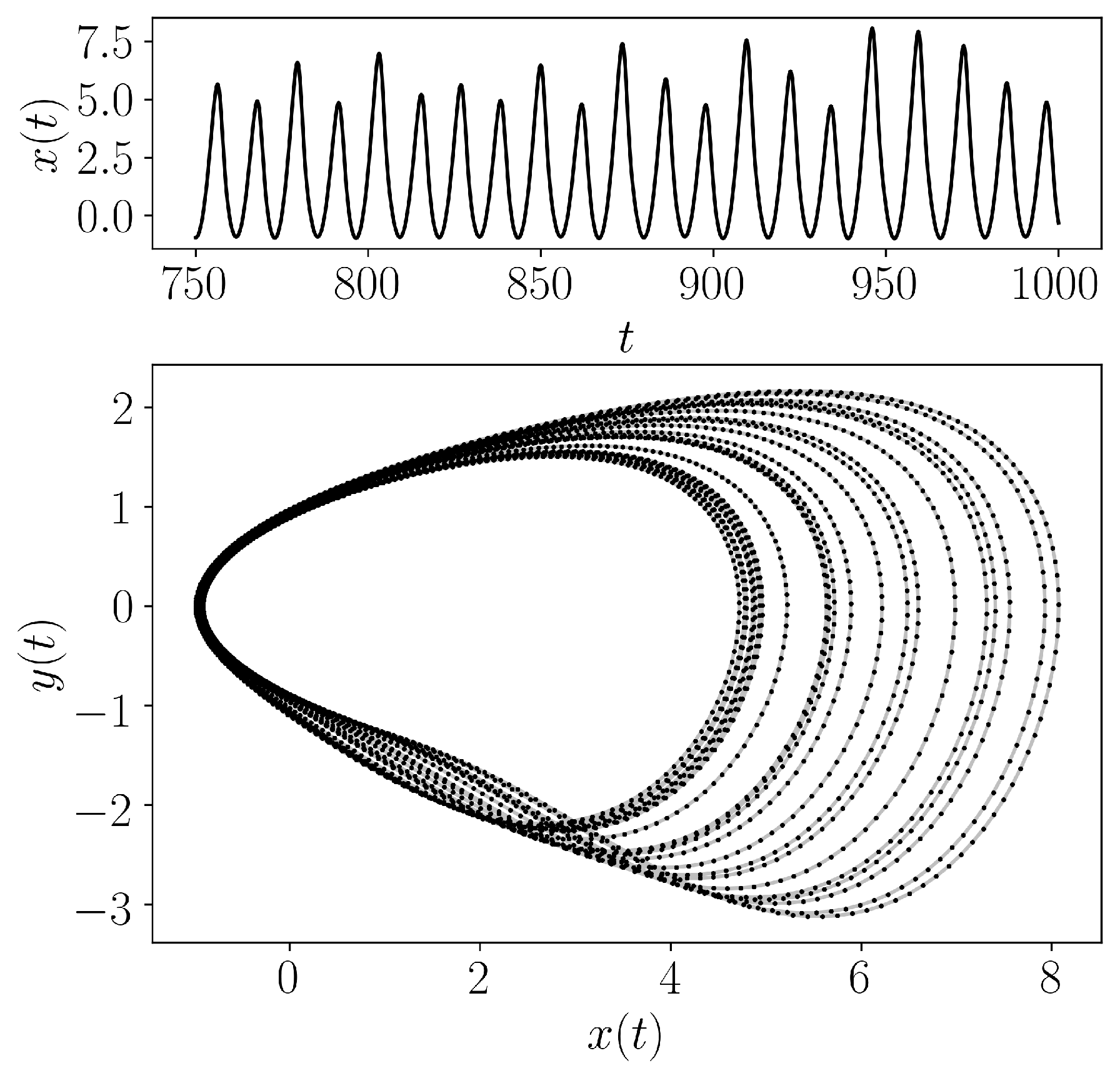
The Simplest Quadratic Chaotic Flow is defined [11] as
\[ \begin{align}\begin{aligned}\dot{x} &= y,\\\dot{y} &= z,\\\dot{z} &= -az - by^2 - x\end{aligned}\end{align} \]The system parameters are set to \(a = 2.017\), \(b = 1.0\) for a chaotic response we could not find any periodic response near this value. The initial conditions were set to \([x, y, z] = [-0.9,0.0,0.5]\). The system was simulated for 1000 seconds at a rate of 20 Hz and the last 250 seconds were used for the chaotic response.
- Parameters:
parameters (Optional[floats]) – Array of two floats [\(a\), \(b\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
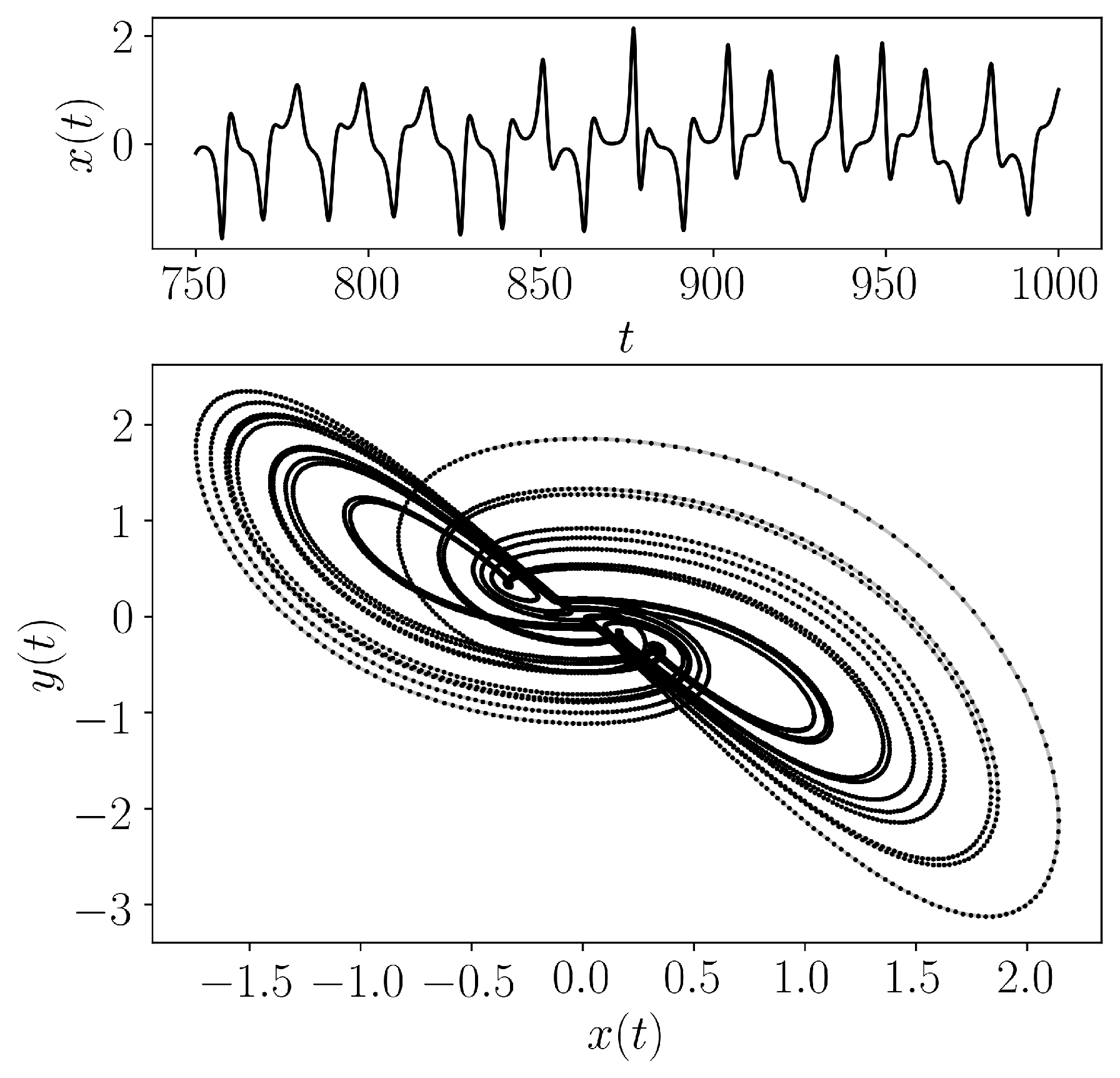
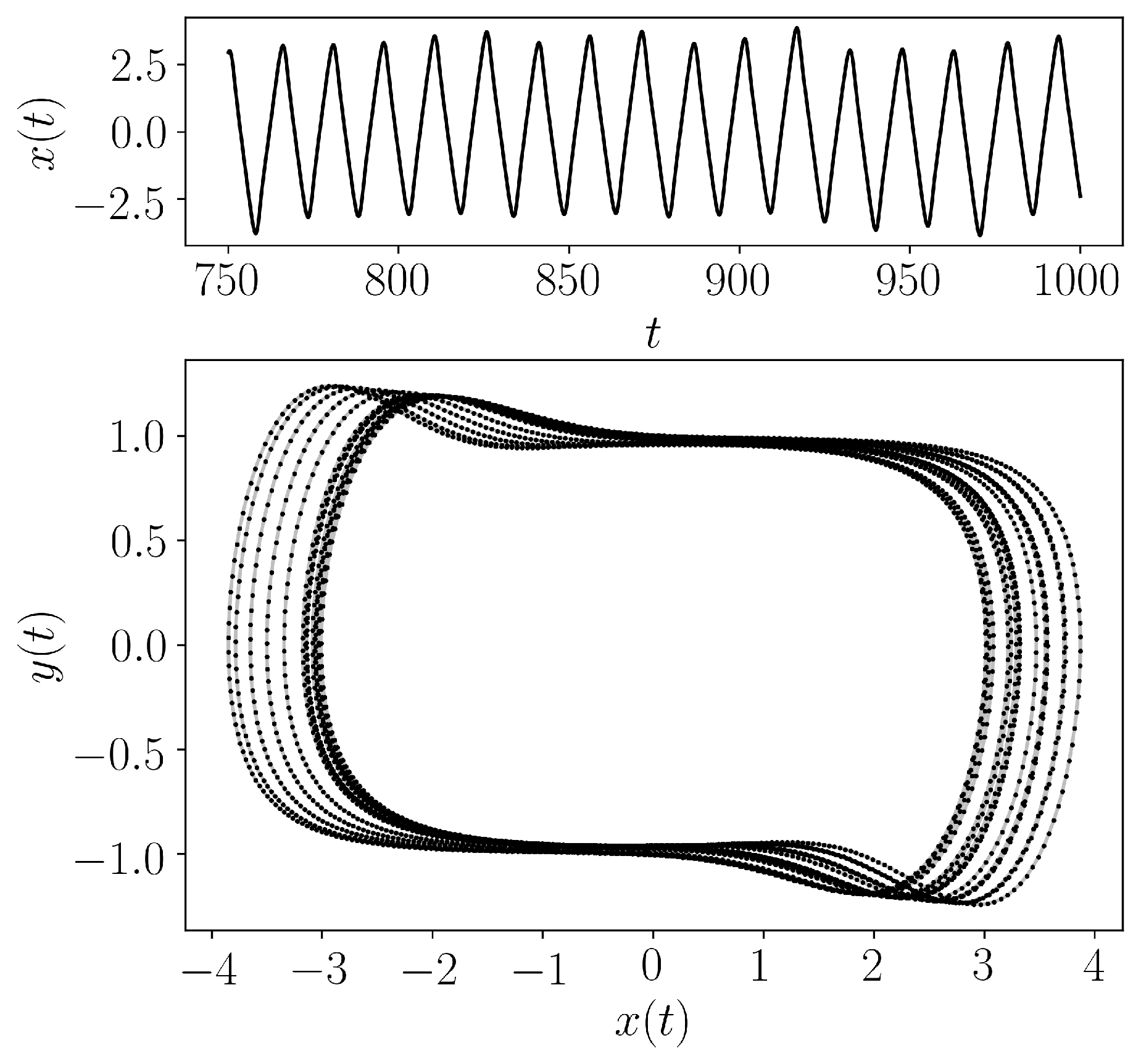
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.simplest_cubic_chaotic_flow(parameters=[2.11, 2.5], dynamic_state=None, InitialConditions=[0.0, 0.96, 0.0], L=1000.0, fs=20, SampleSize=5000)[source]
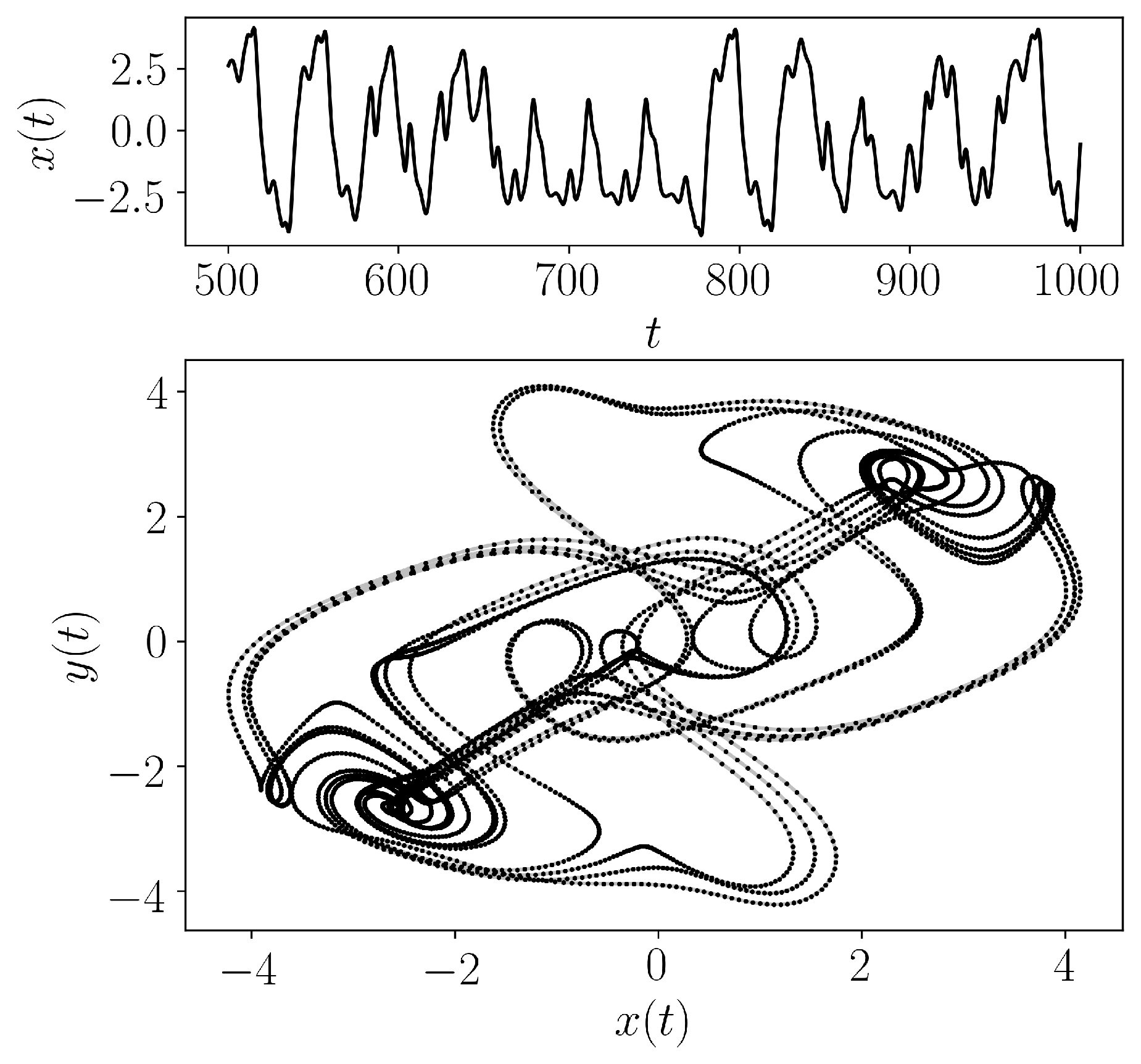
The Simplest Cubic Chaotic Flow is defined [12] as
\[ \begin{align}\begin{aligned}\dot{x} &= y,\\\dot{y} &= z,\\\dot{z} &= -az - xy^2 - x\end{aligned}\end{align} \]The system parameters are set to \(a = 2.11\), \(b = 2.5\) for a periodic response and \(a = 2.05\) for chaotic. The initial conditions were set to \([x, y, z] = [0.0,0.96,0.0]\). The system was simulated for 1000 seconds at a rate of 20 Hz and the last 250 seconds were used for the chaotic response.
- Parameters:
parameters (Optional[floats]) – Array of two floats [\(a\), \(b\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.simplest_piecewise_linear_chaotic_flow(parameters=[0.7], dynamic_state=None, InitialConditions=[0.0, -0.7, 0.0], L=1000.0, fs=40, SampleSize=5000)[source]
The Simplest Piecewise-Linear Chaotic Flow is defined [13] as
\[ \begin{align}\begin{aligned}\dot{x} &= y,\\\dot{y} &= z,\\\dot{z} &= -az - y + |x| - 1\end{aligned}\end{align} \]The system parameter is set to \(a = 0.7\) for a periodic response and \(a = 0.6\) for chaotic. The initial conditions were set to \([x, y, z] = [0.0,-0.7,0.0]\). The system was simulated for 1000 seconds at a rate of 20 Hz and the last 250 seconds were used for the chaotic response.
- Parameters:
parameters (Optional[floats]) – Array of one float [\(a\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References
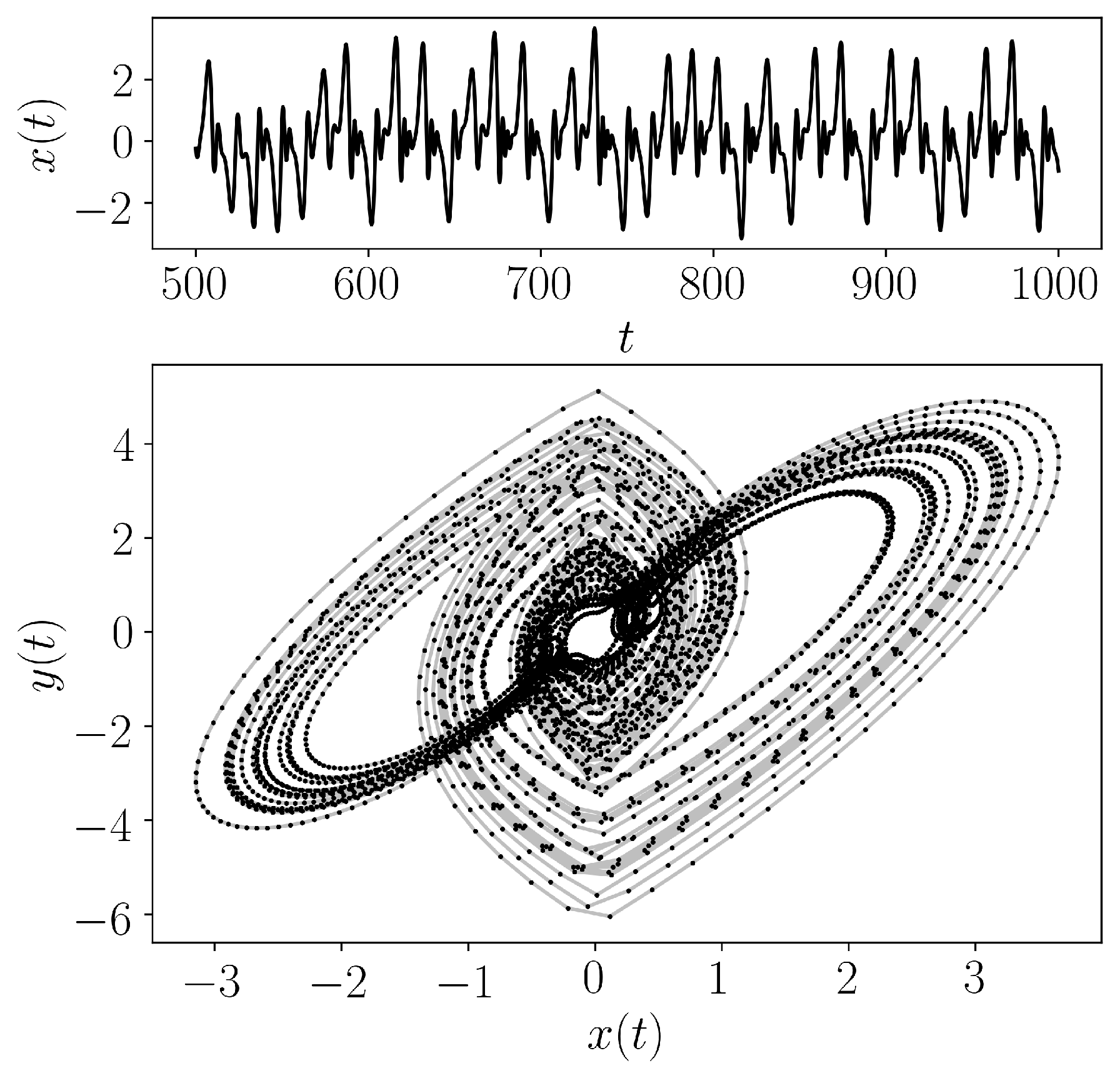
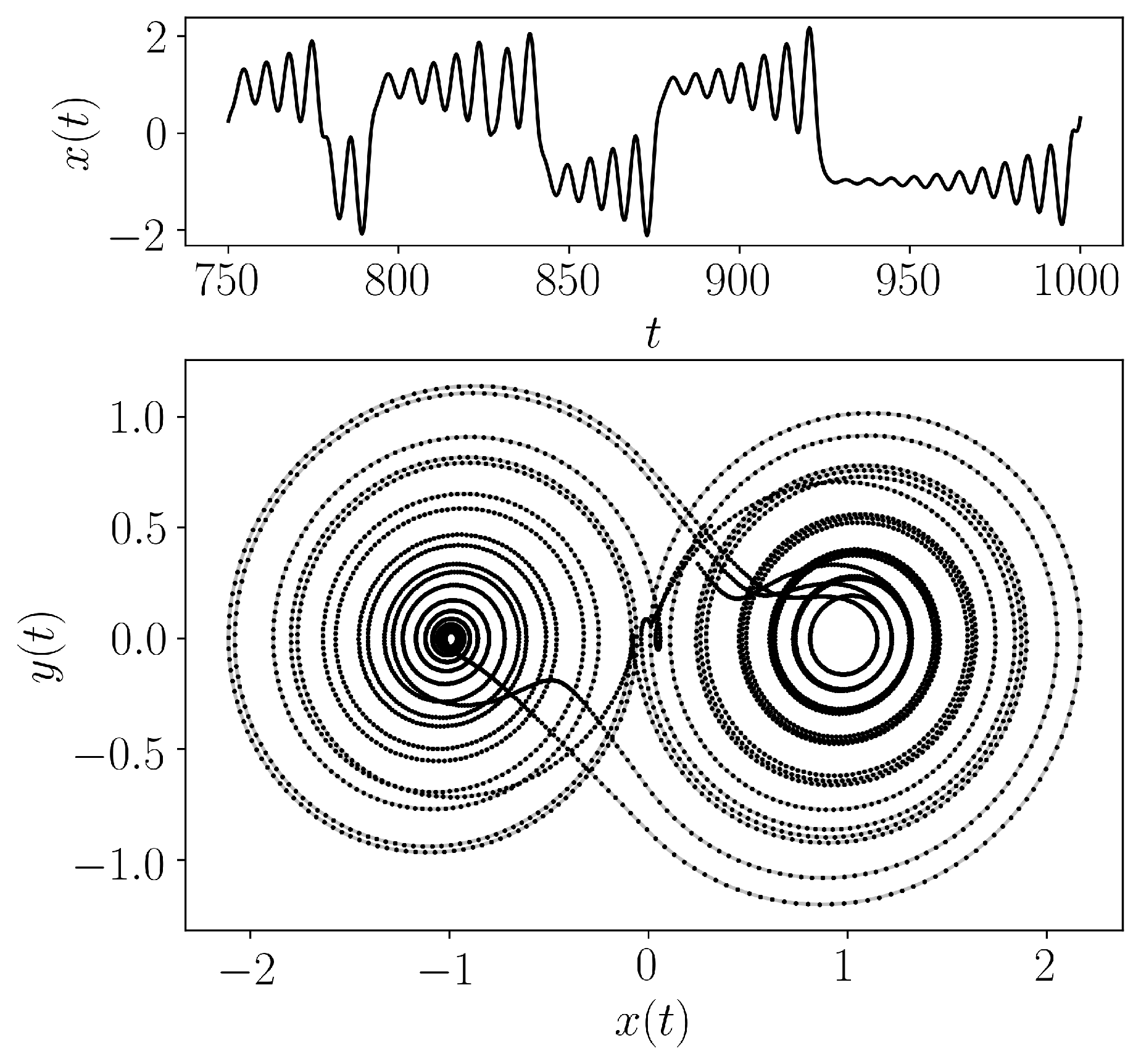
- teaspoon.MakeData.DynSysLib.autonomous_dissipative_flows.double_scroll(parameters=[1.0], dynamic_state=None, InitialConditions=[0.01, 0.01, 0.0], L=1000.0, fs=20, SampleSize=5000)[source]
The Double Scroll Attractor is defined [14] as
\[ \begin{align}\begin{aligned}\dot{x} &= y,\\\dot{y} &= z,\\\dot{z} &= -a(x + y + z - \text{sgn}(x))\end{aligned}\end{align} \]The system parameter is set to \(a = 1.0\) for a periodic response and \(a = 0.8\) for chaotic. The initial conditions were set to \([x, y, z] = [0.01,0.01,0.0]\). The system was simulated for 1000 seconds at a rate of 20 Hz and the last 250 seconds were used for the chaotic response.
- Parameters:
parameters (Optional[floats]) – Array of one float [\(a\)] or None if using the dynamic_state variable
fs (Optional[float]) – Sampling rate for simulation
SampleSize (Optional[int]) – length of sample at end of entire time series
L (Optional[int]) – Number of iterations
InitialConditions (Optional[floats]) – list of values for [\(x_0\), \(y_0\), \(z_0\)]
dynamic_state (Optional[str]) – Set dynamic state as either ‘periodic’ or ‘chaotic’ if not supplying parameters.
- Returns:
Array of the time indices as t and the simulation time series ts
- Return type:
array
References